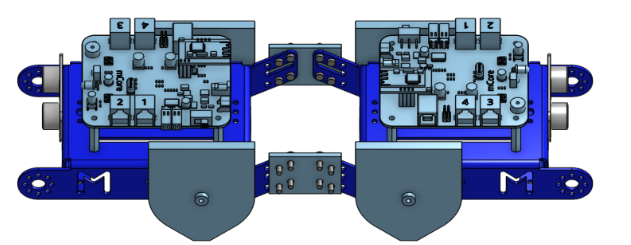
이 로봇 공학에는 MBOTS를 연결하고 걷기에 필요한베이스 우드 레그 및 커넥터가 포함되어 있지만 MBOTS 자체는 포함되지 않습니다.유전자 알고리즘을 사용하여 4 배의 걷기, GitHub에있는 코드를 만들 수 있습니다.