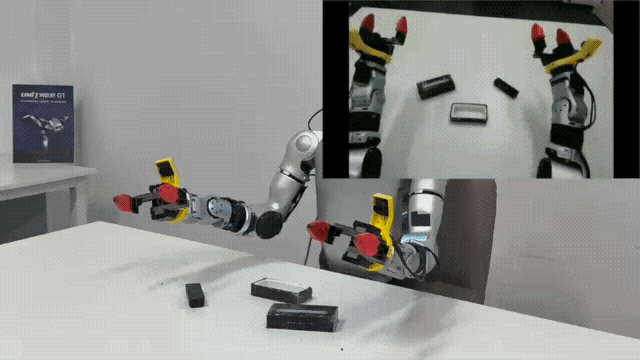
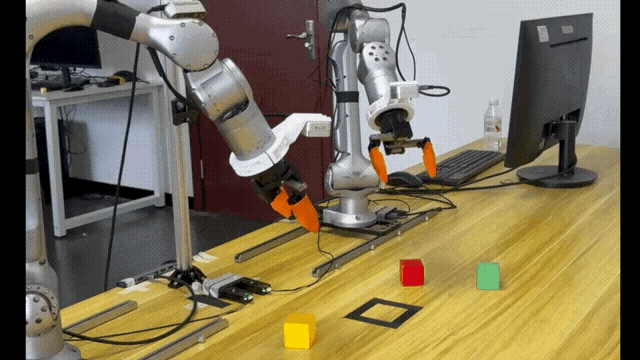
Unifolm-WMA-0은 Unitree의 새로운 오픈 소스 세계 모델 액션 프레임 워크입니다.그것은 일반적인 목적 로봇에게 그들의 환경을 이해하고 물리적으로 상호 작용하는 방법을 가르치도록 설계되었습니다.