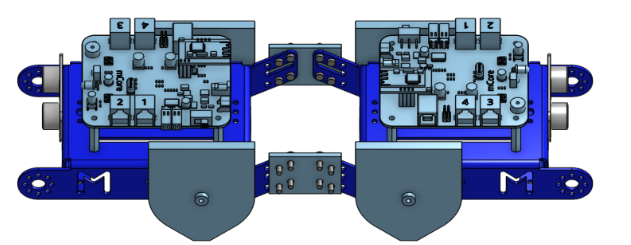
このロボット工学には、MBOTを接続して歩くために必要なバスウッドの脚とコネクタが含まれていますが、MBOT自体は含まれていないことに注意してください。遺伝的アルゴリズムを使用して、GitHubにあるコードである四足歩行を行うことができます。